DeeP MeLT
Arson's Lab
Bio-inspired burrowing mechanics
Cavity expansion theory, X-ray CT scanning, FEM, SPH, machine learning
Through two current projects on self-anchored burrowing robots, we are learning more about how animals adapt their burrowing strategies to the terrain. We seek to calculate the forces and moments engaged in the limbs of burrowing animals to design self-propelled probes that can excavate with minimum soil disturbance, to allow data collection on soil properties by embarked sensors. Machine learning algorithms are being developed to interpret the data collected and to optimize the design of underground structures.
- H. He, A. Karsai, B. Liu, F.L. Hammond III, D.I. Goldman, C. Arson, 2023. Simulation of compound anchor intrusion in dry sand by a hybrid FEM+SPH method, Computers and Geotechnics, DOI: 10.1016/j.compgeo.2022.105137
- F. Patino-Ramirez, F. Anselmucci, E. Ando, G. Viggiani, B. Caicedo, C. Arson, 2023. Deformation and failure mechanisms of granular soil around pressurised shallow cavities, Geotechnique, DOI: 10.1680/jgeot.21.00136
- A. Martinez, J. DeJong, I. Akin, A. Aleali, C. Arson et al., 2022. Bio-inspired Geotechnical Engineering: Principles, Current Work, Opportunities and Challenges, Géotechnique, DOI: 10.1680/jgeot.20.P.170.
- L.F. Patino-Ramirez, Z.J. Wang, D.H. Chau, C. Arson, 2022. Back-calculation of soil parameters from displacement-controlled cavity expansion under geostatic stress by FEM and machine learning, Acta Geotechnica, DOI: 10.1007/s11440-022-01698-z
- F. Anselmucci, E. Ando, G. Viggiani, N. Lenoir, C. Arson, L. Sibille, 2021. Imaging soil kinematics during the first days of maize root growth in sand, Scientific Reports, DOI: 10.1038/s41598-021-01056-1
- F. Anselmucci, E. Ando, G. Viggiani, N. Lenoir, R. Peyroux, C. Arson, L. Sibille, 2021. The use of X-ray tomography to investigate soil deformation around growing roots, Géotechnique Letters, DOI: 10.1680/jgele.20.00114.
- F. Patino-Ramirez, C. Layhee, C. Arson, 2020. Horizontal directional drilling (HDD) alignment optimization using ant colony optimization, Tunnelling and Underground Space Technology, DOI: 10.1016/j.tust.2020.103450.
- L.F. Patino-Ramirez, C. Arson, 2020. Machine learning algorithms applied to the blowout susceptibility estimation around pressurized cavities in drained soil, IS-Cambridge 2020, 10th international symposium on geotechnical aspects of underground construction in softs ground, 29-30 June 2020 (postponed to 2021).
- F. Anselmucci, E. Ando, L. Sibille, N. Lenoir, R. Peyroux, C. Arson, G. Viggiani, G. Bengough, 2019. Root-reinforced sand: kinetic response of the soil, IS-Glasgow 2019, 7th International Symposium on Deformation Characteristics of Geomaterials, Glasgow, UK, June 26-28, 2019.
- F. Anselmucci, E. Ando, L. Sibille, N. Lenoir, G. Viggiani, R. Peyroux, C. Arson, G. Bengough, 2018. Quantifying micro-structural changes in sand due to plant root growth, Bio-inspired and Bio-mediated Geotechnics workshop, ISSMGE conference, Atlanta, Sept.13, 2018.
- L.F. Patino-Ramirez, C. Arson, 2018. Numerical analysis of the plastic zone in drained soil around a pressurized cylindrical cavity under biaxial stress, IS Atlanta 2018, ISSMGE conference micro-to-macro geomechanics from theory to practice, Sept. 9-12, 2018.
Simulation of penetration and burrowing processes (FEM and SPH)
We are collaborating with Haley & Aldrich to understand why mole rats can move forward and backward with ease in the tunnels that they burrow. How can mole rats anchor themselves sufficiently in the soil that they previously excavated to move uphill and downhill? Answering this question will provide clues to develop a bidirectional propeller for self-anchored probe retrieval. The bidirectional propeller will facilitate collection of residual strength data, which will help assess the risks of ground loss or borehole instability in Horizontal Directional Drilling (HDD). We are developing a modeling approach that can be used to simulate anchor penetration and pull out at reasonable computational cost. The Smooth Particle Hydrodynamics (SPH) method is used to simulate the soil close to the penetration zone where large deformation of soil takes place, while the portions of the model where only small strain is expected (i.e., probe and far-field soil) are simulated by the Finite Element Method (FEM). FEM+SPH cone penetration simulations were benchmarked successfully against FEM results, which proved the concept of the proposed numerical approach.
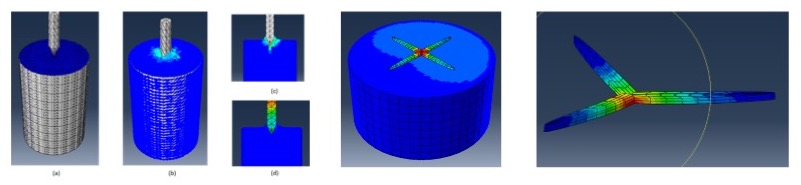
Pictures: He and Arson, 2020
Influence of plant root growth on soil microstructure and strength
We study of the influence of plant root growth on the density of a granular soil. Our collaborators at L3SR established a protocol to obtain reproducible samples of sand with a sprouting seed. Maize and chickpea roots are grown in tubes filled by pluviation with Hostun sand. Root development and induced soil micro-structural changes are imaged every 24 hours by x-ray tomography for 7 days. The acquired images are processed and trinarized into separate phases (soil, root, voids). This allows measuring the evolution of soil porosity during root growth to be measured. Eventually, a sub-volume of soil around a root tip is defined after 7 days of growth and the evolution of porosity in that volume is characterized in reverse chronological order. The root does not affect the soil local porosity nor the topology of the root system at a distance larger than ten times the diameter of the main root. The evolution of local porosity is not fully understood at this stage, but it is reproducible.
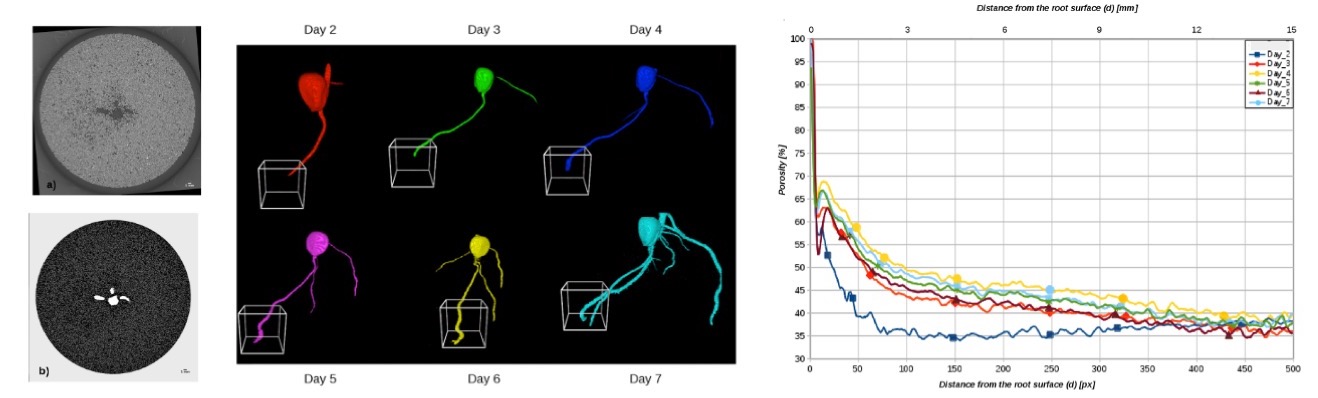
Pictures: Anselmucci, Ando, Sibille, Lenoir, Viggiani, Peyroux, Arson, Bengough, 2018
Root-like cavity expansion at shallow depth
In plant roots, water uptake increases the turgor pressure inside the root cells, which pushes cell membranes against stiff cell walls. Roots thus expand radially, leading to a decrease in soil compressive stress ahead of the tip, allowing for root axial growth. Plant roots can be seen as pressurized vessels that adapt their shape to soil mechanical response, thus probing soil properties. In general, the deformation patterns and failure mechanisms of pressurised cavities at shallow depth are of relevance to many geotechnical applications, including tunneling and horizontal directional drilling. That is why we conducted an experimental study of a reduced-scale pressurised cavity under geostatic stress, in order to measure the effect of cavity length, vertical stress and soil density on soil deformation and failure. x-ray computed tomography was used to acquire images of the system at key stages of the cavity inflation process. A closed shaped failure region developed around the cavities, beyond which, shear planes of elliptic paraboloid shape formed, extending from the bottom of the cavities all the way to the free surface. The plane strain assumption did not hold beyond the central portion of the longest cavity tested (L = 6D). The volumetric strain and porosity changes inside the shear bands showed significant dilation in dense specimens, but contraction in loose specimens. The average orientation and the thickness of the shear bands were in agreement with those found in the literature for passive arching mechanisms (anchoring). The orientation of the principal strains around the cavity follows catenary shapes, similar to those displayed in active trapdoor mechanisms.
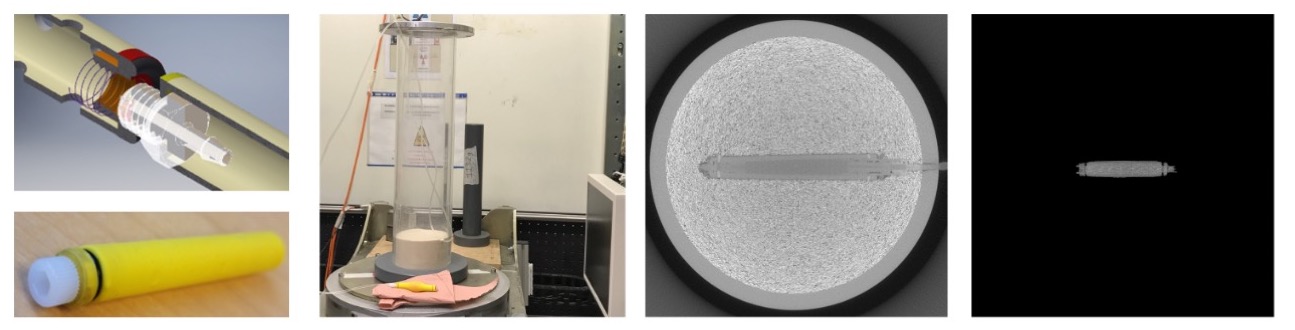
Pictures: Patino-Ramirez, Arson, Caicedo, Viggiani, Sibille, Ando, Lenoir, 2018
Machine learning - based estimation to blowout susceptibility around pressurized cavities
The need to solve complex problems that still do not have a closed form analytical solution is one of the challenges of current practice, including the susceptibility estimation of cavity blowout during horizontal directional drilling (HDD). Computational tools and high frequency data acquisition in conjunction with machine learning open up new opportunities to create tools that can aid in the understanding and design of these problems. We propose the use of a predictor function, calibrated with a pool of numerical simulations that can predict the susceptibility of blowout of a cavity, given a fixed geometrical and stress configuration based on the mechanical parameters of the soil the cavity is embedded in; results using k-means clustering (for classification) and support vector machines (SVM) to create the predictor function, showed and accuracy of about 87% in predicting the blowout susceptibility.
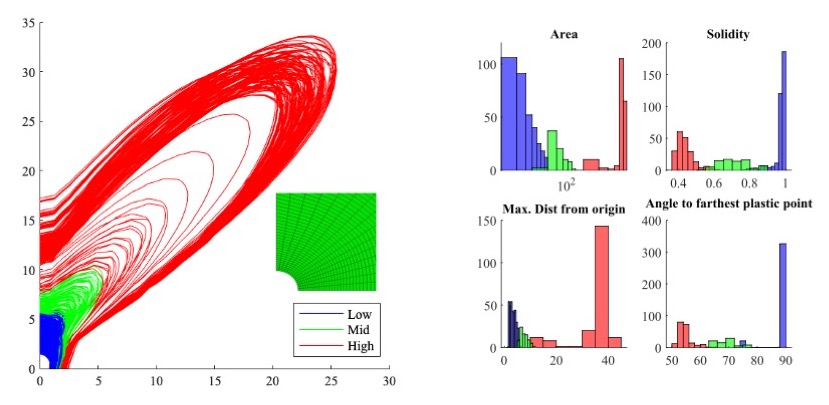
Pictures: Patino-Ramirez and Arson, 2020
Design of Horizontal Directional Drilling alignment by Ant Colony Optimization (ACO)
Horizontal Directional Drilling (HDD) is a trenchless method that consists in drilling an inclined and curved bore from an entry point to an exit point. In practice, HDD is designed iteratively by trial and error, to minimize the cost under geometric and mechanical constraints. Here, we optimize the drill path with continuous implementations of an Ant Colony Optimization (ACO) algorithm that sets the depth of the alignment and its entry and exit angles as the design parameters to optimize, to ensure minimal drill path length (cost), avoid collapse or instability (mechanical constraints) and remain in the construction domain (geometric constraint). We compare the ACO results to the drill paths designed in practice in two different scenarios: one in which the entry and exit points are fixed, and one in which the geometry of the central segment is constrained. Results show that ACO can be used to automate the otherwise time-consuming design process while minimizing the drill path length and the costs associated to it.
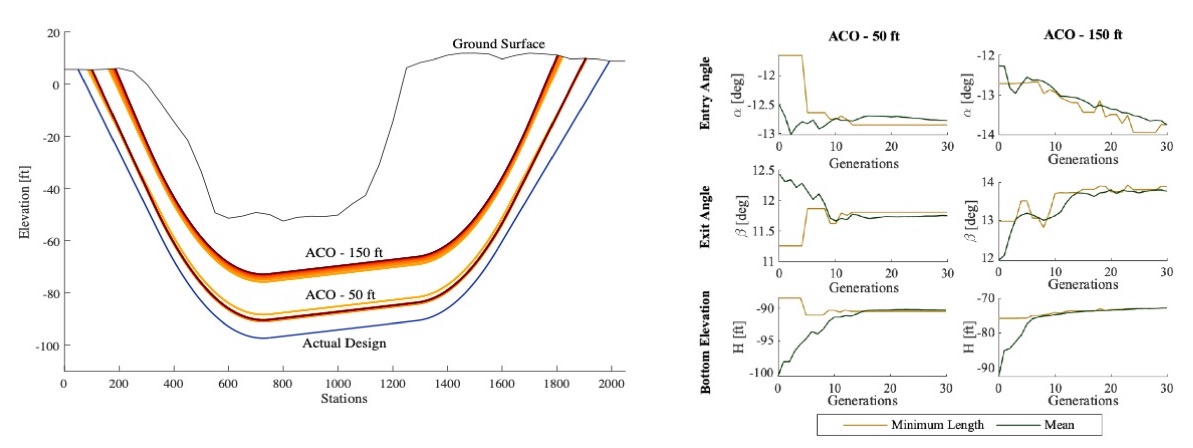
Pictures: Patino-Ramirez, Layhee, Arson, 2020